You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Kalibrieren
- Thread starter Richtel
- Start date



SefanH
Well-known member
In a straight line, see the video.
https://photos.app.goo.gl/6gkSeMfSzXSfnntF9
The ODO settings are here.
https://photos.app.goo.gl/6gkSeMfSzXSfnntF9
The ODO settings are here.
Attachments

Richtel
Well-known member
So today I tried around again with different settings. but unfortunately overload again and again!? and turns in circles!?
First of all, Sefan's values again...
First of all, Sefan's values again...
Attachments
Richtel
Well-known member
and secondly, Bernard's values from his videos from above... unfortunately there's nothing usable there yet. sometimes he finds the wire and follows it but that seems more like gambling. strange!?
Attachments

Richtel
Well-known member
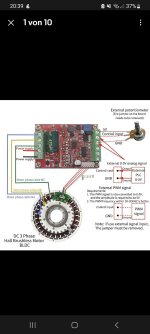
Sollte doch beim brushless Motor egal sein wierum er läuft oder!?
Meine Motoren sind so angeschlossen... grün blau gelb!
Oder sollte mann sich an solchen Bildern orientieren wegen der fasen (MA MB MC)
Meine Motoren sind so angeschlossen... grün blau gelb!
Oder sollte mann sich an solchen Bildern orientieren wegen der fasen (MA MB MC)
Attachments

Last edited:
Du musst dich nach MA MB MC richten:
45ZW2430 24V DC 28W Brushless Motor & 12-36v 500w Brushless Driver
No test this week . Here video of the first run last week end. Tracking and motor sense work also perfectly. Only noise in perimeter signal is the actual issue
www.diy-robot-lawn-mower.com
SefanH
Well-known member
Ich kann morgen mal genau nachsehen und Fotos machen, aber soweit ich weiß hatte ich bei den Fahrmotoren links, sowie rechts ABC = gelb, grün, blau angeschlossen. Bei den Hallsensoren habe ich blau und grün vertauscht. Also ABC = gelb, blau, grün.
Der Mähmotor hat andere Kabelfarben.
Vielleicht schaffe ich es ja jetzt gleich noch ein paar Fotos zu machen?!?
Der Mähmotor hat andere Kabelfarben.
Vielleicht schaffe ich es ja jetzt gleich noch ein paar Fotos zu machen?!?
This kind of issue occur when the main loop is not OK.View attachment 1483
Is it possible that the odometry runs in the wrong direction? Or the motor turns in the wrong direction?
Or is this ok?
Message is : firmware send a pwm = 85 (Forward) and the last PWM send was -29 (reverse), so it's not possible or can destroy the motor .
Odometry don't know the dir rotation of motor , only the PWM + or - send signal to pinDir of the motor driver, so it's not Odometry issue.
If motor is not correctly wired the test ODO, maual drive ETC ... don't work well.Sollte doch beim brushless Motor egal sein wierum er läuft oder!?
Meine Motoren sind so angeschlossen... grün blau gelb!
Oder sollte mann sich an solchen Bildern orientieren wegen der fasen (MA MB MC)
SefanH
Well-known member
Bernard's explanation makes sense!
Since I just unscrewed the mower outside, I'll still tell you the cable colors")
Mowmotor:
Motor: white, blue, green
Hallsensor: white, blue, green
Drivemotors:
Motor: yellow, green, blue
Hallsensor: yellow, blue, green
The error must lie somewhere. It must be due to overload. But where does it come from?
Since I just unscrewed the mower outside, I'll still tell you the cable colors
Mowmotor:
Motor: white, blue, green
Hallsensor: white, blue, green
Drivemotors:
Motor: yellow, green, blue
Hallsensor: yellow, blue, green
The error must lie somewhere. It must be due to overload. But where does it come from?
SefanH
Well-known member
Have you ever deactivated everything that is not needed for tracking? Also physically separated from the pcb?
Are you sure the SD Card is OK.
Can you try to remove it ?
@Richtel
You can test this new function of code (into robot.cpp) replace the actual one by this.
You can test this new function of code (into robot.cpp) replace the actual one by this.
Code:
void Robot::writeOnSD(String message) {
StartReadAt = millis();
if (sdCardReady) {
//filename is reset into :loadSaveRobotStats
File dataFile = SD.open(historyFilenameChar, FILE_WRITE);
if (dataFile) {
dataFile.print(message);
dataFile.close();
}
totalLineOnFile = totalLineOnFile + 1;
if (totalLineOnFile >= 1000) { // create a new log file if too long
totalLineOnFile = 0;
sprintf(historyFilenameChar, "%02u%02u%02u%02u%02u.txt", datetime.date.year - 2000, datetime.date.month, datetime.date.day, datetime.time.hour, datetime.time.minute);
}
}
EndReadAt = millis();
ReadDuration = EndReadAt - StartReadAt;
if ( ReadDuration > 100) {
ShowMessage("Warning SD card Write duration > 100 ms : ");
ShowMessageln(ReadDuration);
ShowMessageln("SD card is desactivate");
sdCardReady = false;
}
}
void Robot::writeOnSDln(String message) {
StartReadAt = millis();
if (sdCardReady) {
//filename is reset into :loadSaveRobotStats
File dataFile = SD.open(historyFilenameChar, FILE_WRITE);
if (dataFile) {
dataFile.println(message);
dataFile.close();
}
totalLineOnFile = totalLineOnFile + 1;
if (totalLineOnFile >= 1000) { // create a new log file if too long
totalLineOnFile = 0;
sprintf(historyFilenameChar, "%02u%02u%02u%02u%02u.txt", datetime.date.year - 2000, datetime.date.month, datetime.date.day, datetime.time.hour, datetime.time.minute);
}
}
EndReadAt = millis();
ReadDuration = EndReadAt - StartReadAt;
if ( ReadDuration > 100) {
ShowMessage("Warning SD card Write duration > 100 ms : ");
ShowMessageln(ReadDuration);
ShowMessageln("SD card is desactivate");
sdCardReady = false;
}
}Richtel
Well-known member
Nein das könnte ich mal probieren. Danke...Have you ever deactivated everything that is not needed for tracking? Also physically separated from the pcb?
Richtel
Well-known member
@Richtel
You can test this new function of code (into robot.cpp) replace the actual one by this.
Code:void Robot::writeOnSD(String message) { StartReadAt = millis(); if (sdCardReady) { //filename is reset into :loadSaveRobotStats File dataFile = SD.open(historyFilenameChar, FILE_WRITE); if (dataFile) { dataFile.print(message); dataFile.close(); } totalLineOnFile = totalLineOnFile + 1; if (totalLineOnFile >= 1000) { // create a new log file if too long totalLineOnFile = 0; sprintf(historyFilenameChar, "%02u%02u%02u%02u%02u.txt", datetime.date.year - 2000, datetime.date.month, datetime.date.day, datetime.time.hour, datetime.time.minute); } } EndReadAt = millis(); ReadDuration = EndReadAt - StartReadAt; if ( ReadDuration > 100) { ShowMessage("Warning SD card Write duration > 100 ms : "); ShowMessageln(ReadDuration); ShowMessageln("SD card is desactivate"); sdCardReady = false; } } void Robot::writeOnSDln(String message) { StartReadAt = millis(); if (sdCardReady) { //filename is reset into :loadSaveRobotStats File dataFile = SD.open(historyFilenameChar, FILE_WRITE); if (dataFile) { dataFile.println(message); dataFile.close(); } totalLineOnFile = totalLineOnFile + 1; if (totalLineOnFile >= 1000) { // create a new log file if too long totalLineOnFile = 0; sprintf(historyFilenameChar, "%02u%02u%02u%02u%02u.txt", datetime.date.year - 2000, datetime.date.month, datetime.date.day, datetime.time.hour, datetime.time.minute); } } EndReadAt = millis(); ReadDuration = EndReadAt - StartReadAt; if ( ReadDuration > 100) { ShowMessage("Warning SD card Write duration > 100 ms : "); ShowMessageln(ReadDuration); ShowMessageln("SD card is desactivate"); sdCardReady = false; } }
I'll try everything and report back, thank you very much...